








智能巡检机器人
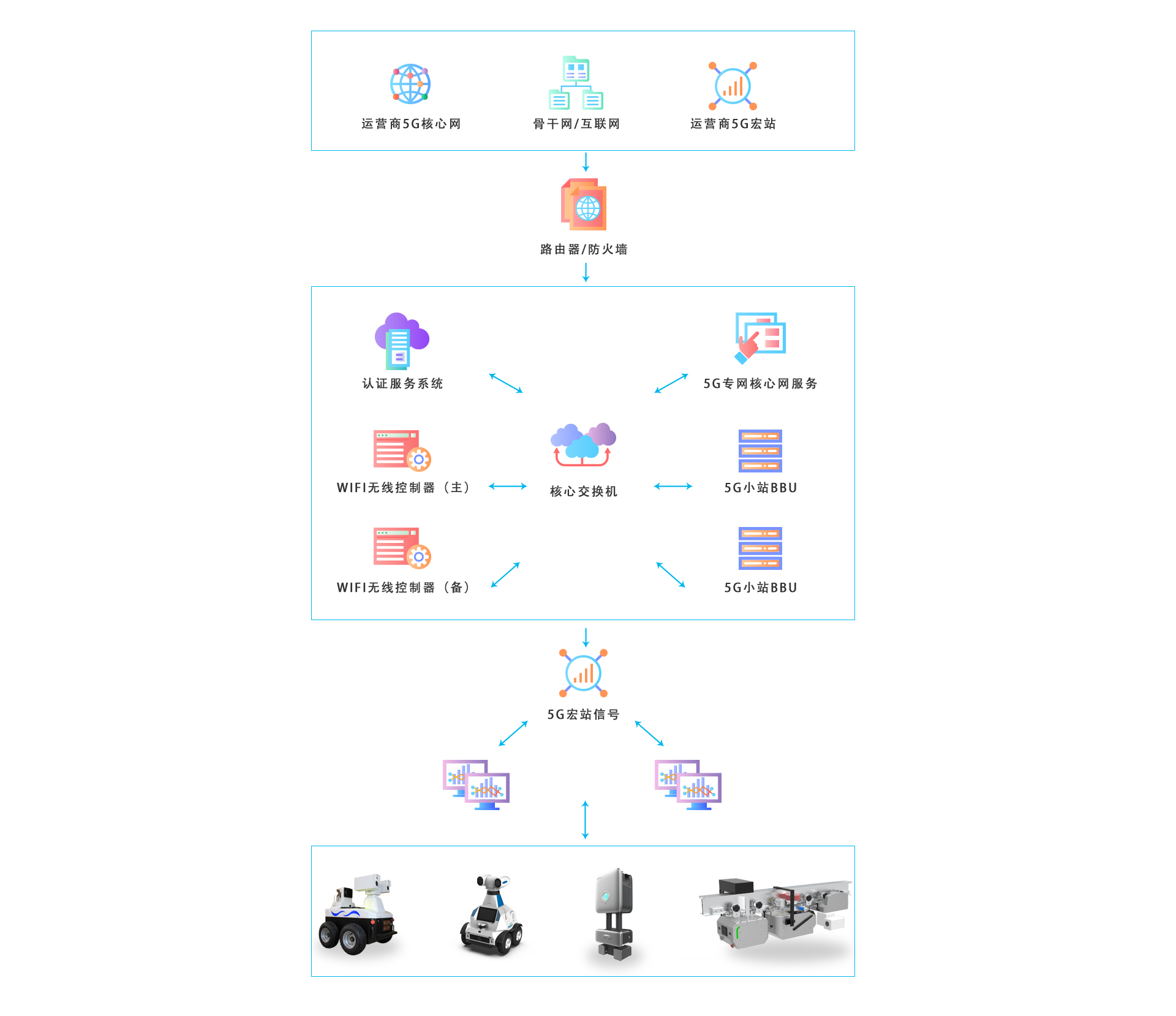
智能巡检系统示意图
轮式巡检机器人
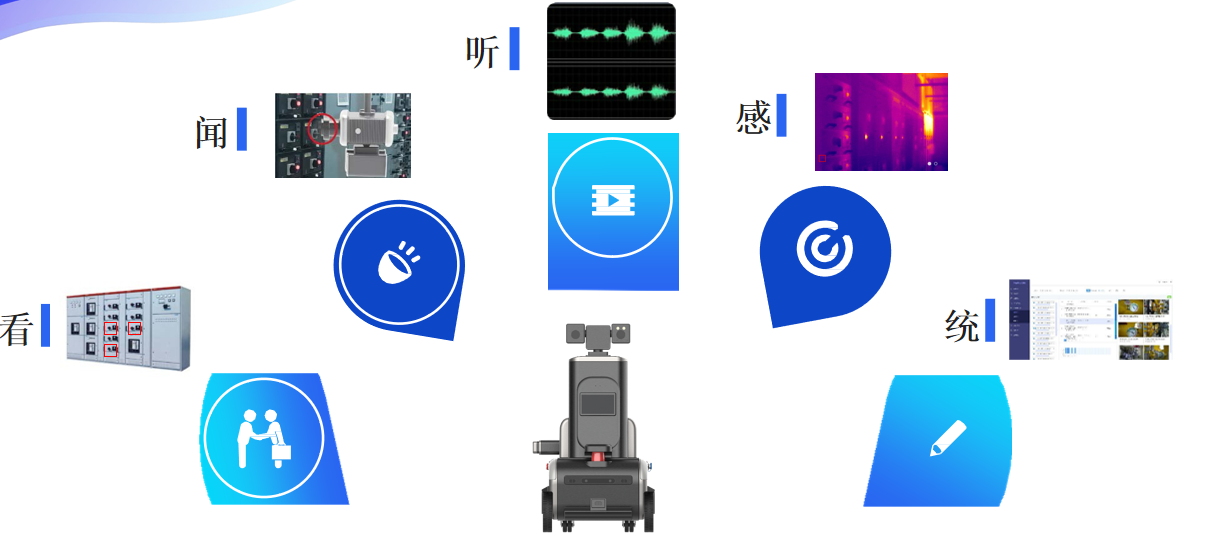
轮式机器人采用伺服电机行走方式,搭载高清摄像机及红外热成像仪,集成网络通信技术、多传感器融合技术、图像分析算法、实时数据库技术等核心技术于一体,实现了自主导航、自动避障、自动充电、仪表读数自动识别、状态指示识别、环境监测、地电局放监测等功能。
轨道升降式巡检机器人
轨道升降式巡检机器人采用轨道吊装式伺服行走方式,搭载高清摄像机及红外热成像仪,集成网络通信技术、多传感器融合技术、图像分析算法、实时数据库技术等核心技术于一体,实现长距离、全方位的开关柜红外测温、局放检测、柜面及保护装置信号状态指示灯的全自主识别,继保室保护屏柜压板状态、空开位置、电流端子状态、装置信号灯指示以及数显仪表的全自动识别读数。同时采用导轨滑触式供电方式,永不断电实现24小时不间断巡视,也可自定义周期和设备进行特殊巡视。
智能巡检机器人是一个实现了自主移动,自我管理,自动避障,自动充电的智能机器人,可以实现连续不间断的巡检作业,通过智能机器人对现场设备状态进行自动化巡检,有效降低劳动强度和现场运维成本,提高巡检作业和管理的自动化和智能化水平。
1)巡检效率:考虑对数据的查看、记录、归档时间,人工巡检平均一个检测点时间约为1-2分钟;机器人单点巡检时间在10-30秒,同步完成数据记录、分析、告警;
2)巡检精度:全覆盖智能巡检系统识别精度保持在98%以上,准确可靠,无人为、环境等主客观因素干扰,实现户内站的可视化、智能化管理与展示;
3)巡检覆盖率:人工巡检主要对各电力柜的电流、电压表进行查看;智能巡检系统能够实现对所有设备表计、开关状态、指示灯等的全面覆盖与智能识别,设备覆盖率至少提升100%以上;
4)数据处理:全覆盖智能巡检系统能够汇总变电站多维检测数据进行分析、管理、告警和故障预测,摈弃了传统人工巡检数据分散、处理效率低的缺陷,实现高效全面智能的全新运检模式;
5)安全生产:全覆盖智能巡检系统能够取代人工,将巡检人员与高压环境隔离开来,消除巡检的安全隐患,实现无人化安全运检。
实现价值
本系统及相关产品专为企业实现全天候、实时、智能化巡检而研发,帮助企业实现如下价值:
★通过巡检机器人全天候动态、实时地监视设备的运行状态以及环境监测,严格按照巡检要求完成日常巡检及 特殊巡检任务,变“问题驱动巡检”为“主动发现问题”,提升设备管理效能及缺陷管理的及时性。
★利用人工智能算法对设备状态进行实时的识别与分析,对发现的隐患提前预警,有效地提高设备检修及时率, 降低设备受损率,提升设备可靠性,减少恶性事故的发生。
★利用机器代替人员在复杂、恶劣环境下的长期性工作,大幅降低人身健康风险、安全风险等,可保障人员安 全,实现安全生产管理。
★利用巡检机器人做大量的重复性工作,缩短巡检人员在发现问题过程中的精力投入,转而深度参与设备状态 分析、运行方式优化、故障分析及解决问题的事情上,从而提升整体的运维水平。
